2025 · ROS 2
Rosight
A keyboard-driven TUI cockpit for ROS 2
- ROS 2
- Python
- TUI
- Robotics Tooling
Overview
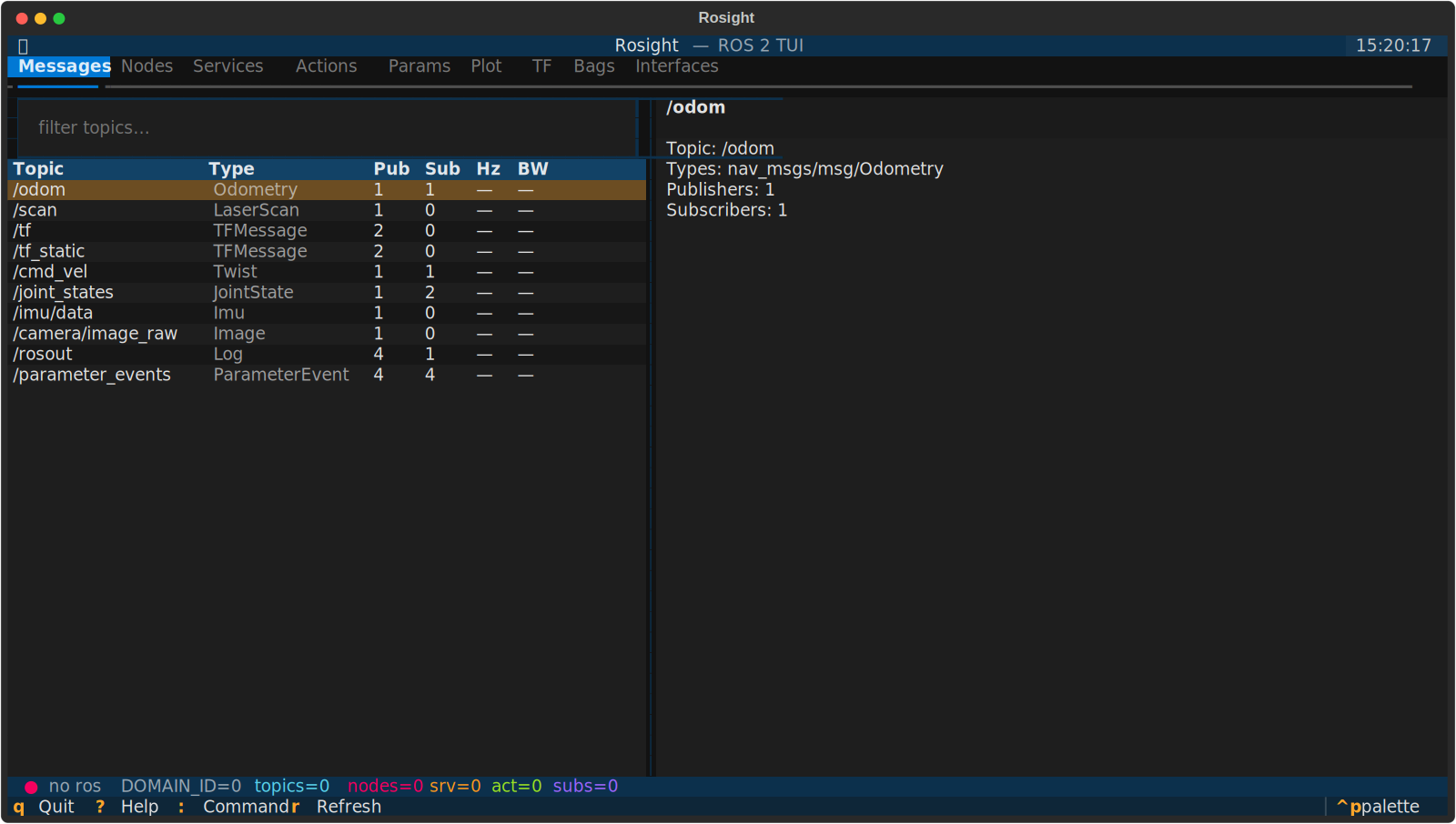
Working with a real robot usually means SSH'ing into a headless box, running half a dozen `ros2 topic` / `ros2 service` / `ros2 bag` commands in different panes, and squinting at scrolling text. Rosight rolls all of that into a single Textual-based TUI that you drive from the keyboard.
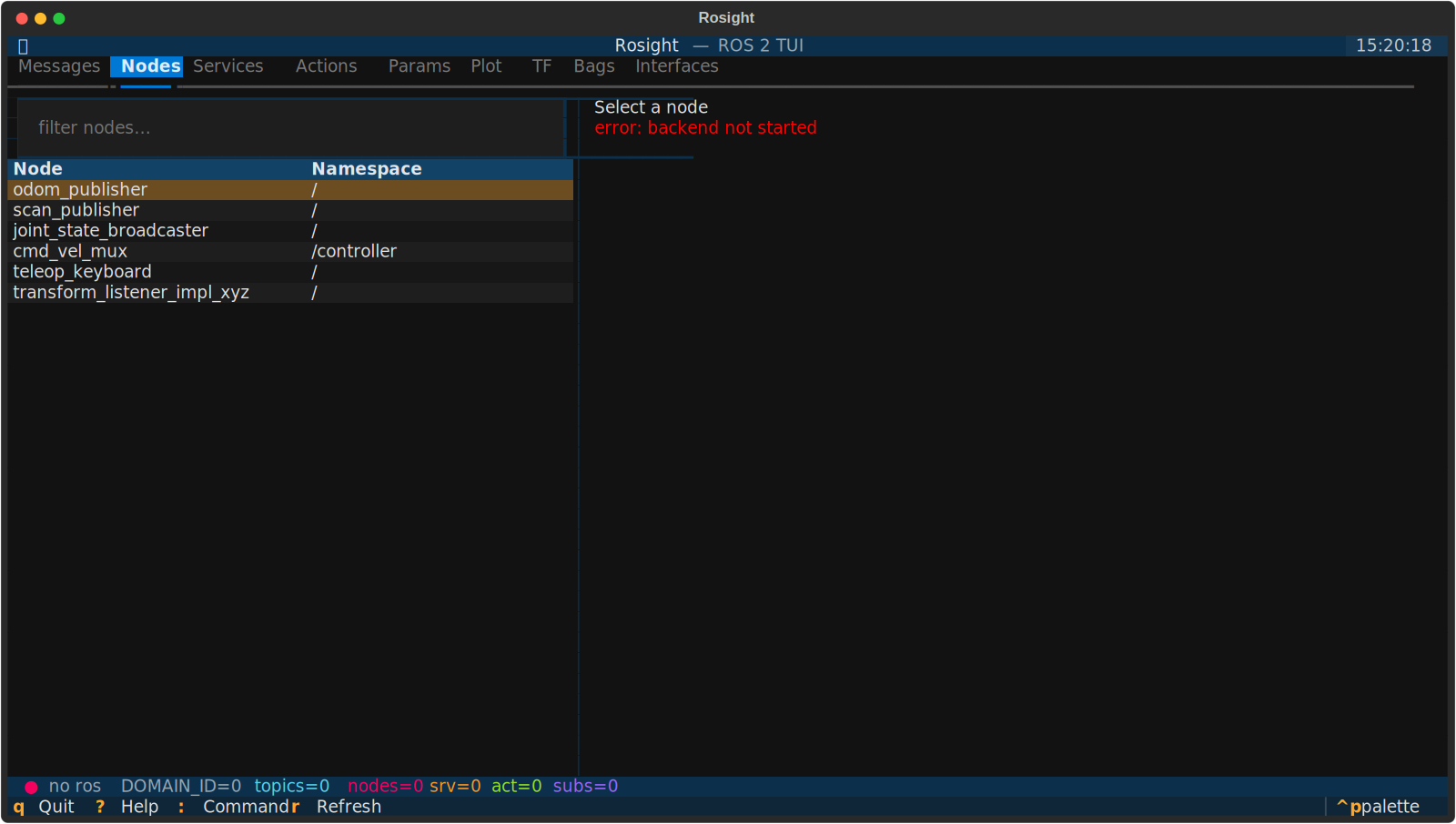
Nine tabs cover the surface area: live message stats (Hz / bandwidth / jitter), nodes and their pub/sub graph, services and actions, per-node parameters, multi-series plotting via plotext, the TF tree, bag recording / playback, and interface definitions. Auto-QoS negotiation matches publisher profiles, the runtime ROS_DOMAIN_ID can be swapped on the fly, and a `--no-ros` mode lets you develop the UI without a ROS install.
Highlights
- Messages — topic table, subscription, live Hz / bandwidth / jitter
- Nodes — discovery + publisher / subscriber / service relationships
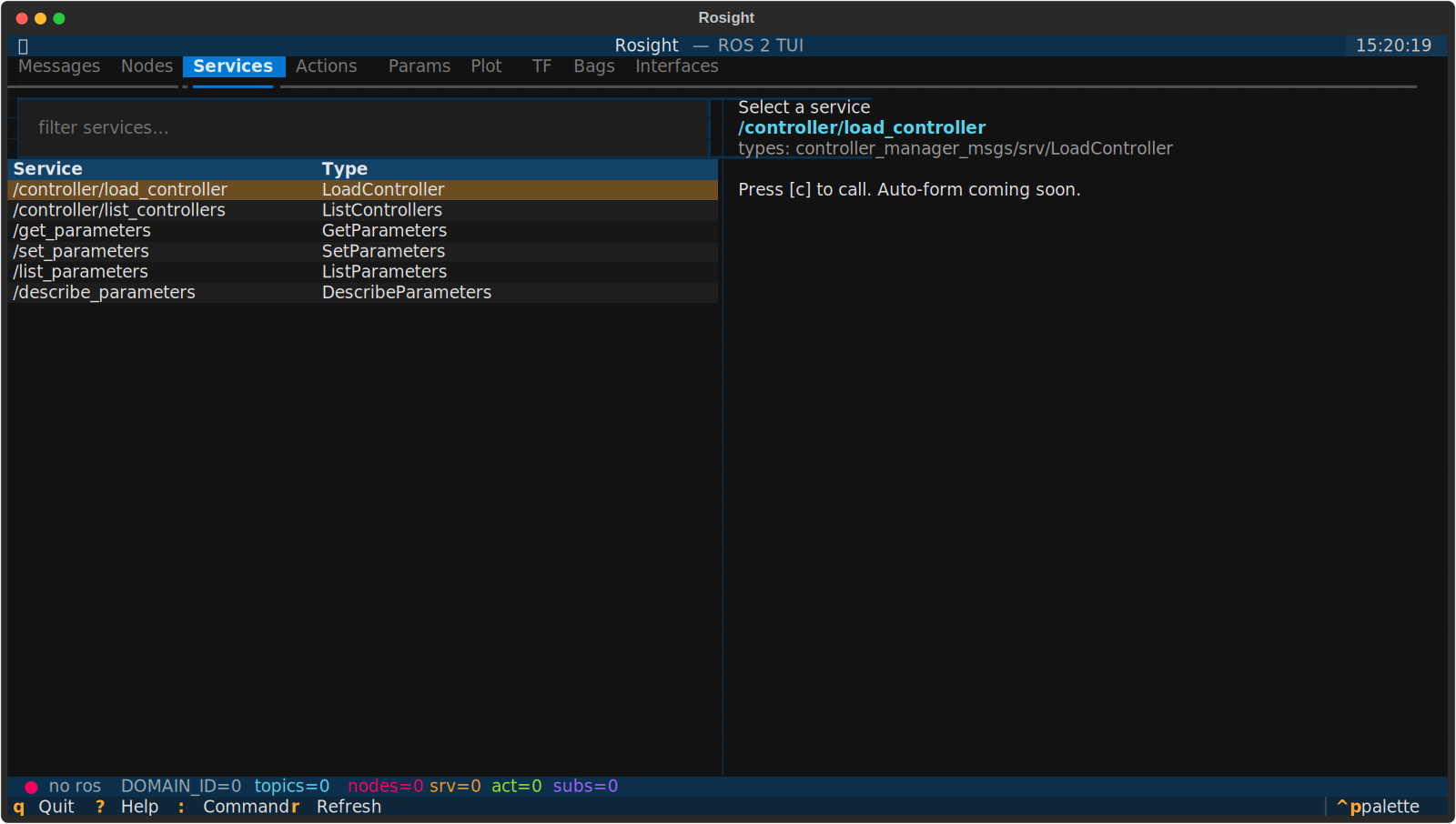
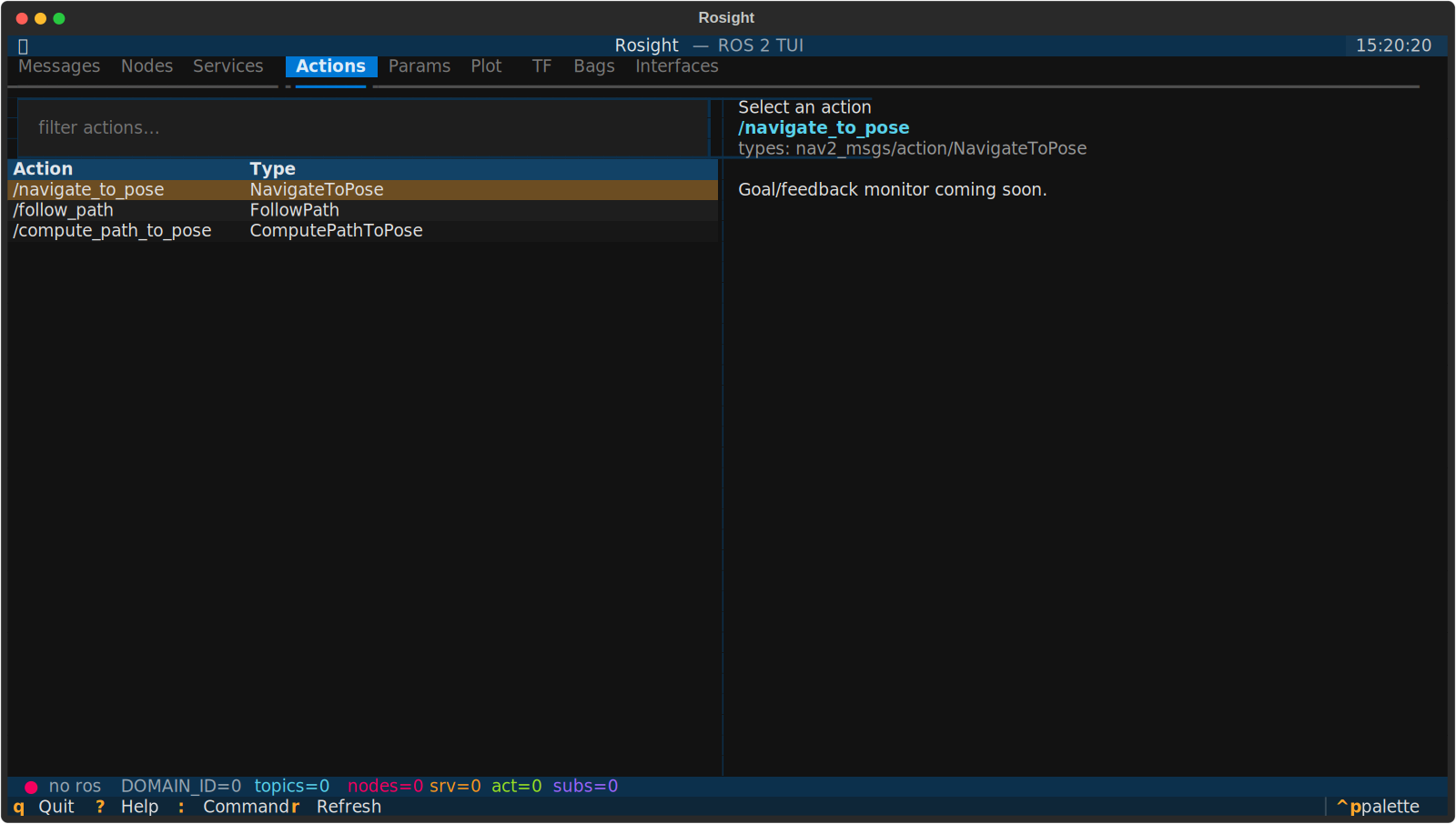
- Services + Actions — listing with type info
- Parameters — per-node get / set
- Plot — multi-series live ANSI plotting with pause / export
- TF — auto-generated frame trees from `/tf`
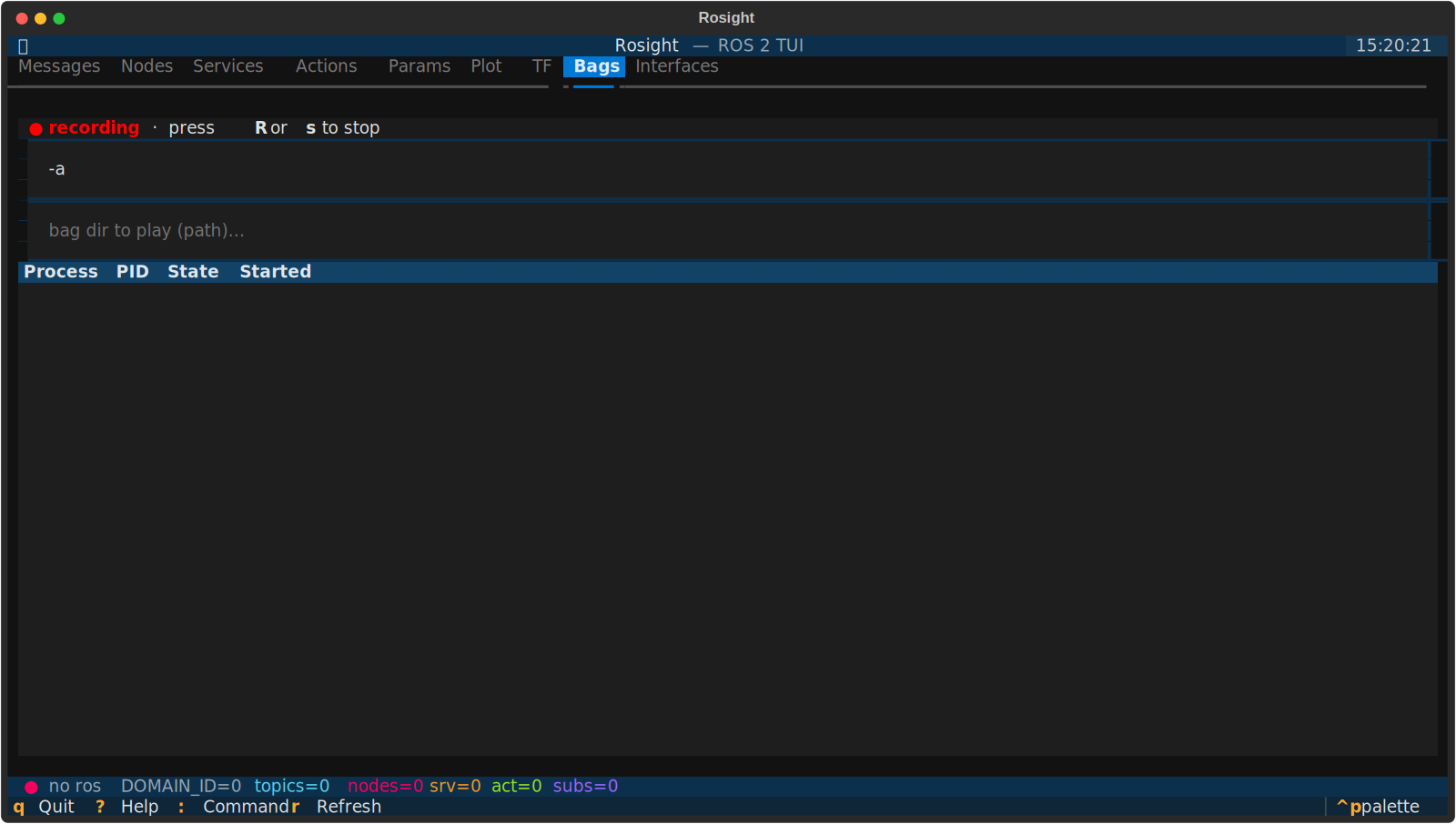
- Bags — record, play, inspect
- Interfaces — message / service / action definitions
- Auto-QoS negotiation; runtime domain switch
- No-ROS UI development mode
Install
pip install rosightGallery