202401
WARM-3D
Weakly-supervised Sim2Real for roadside 3D detection
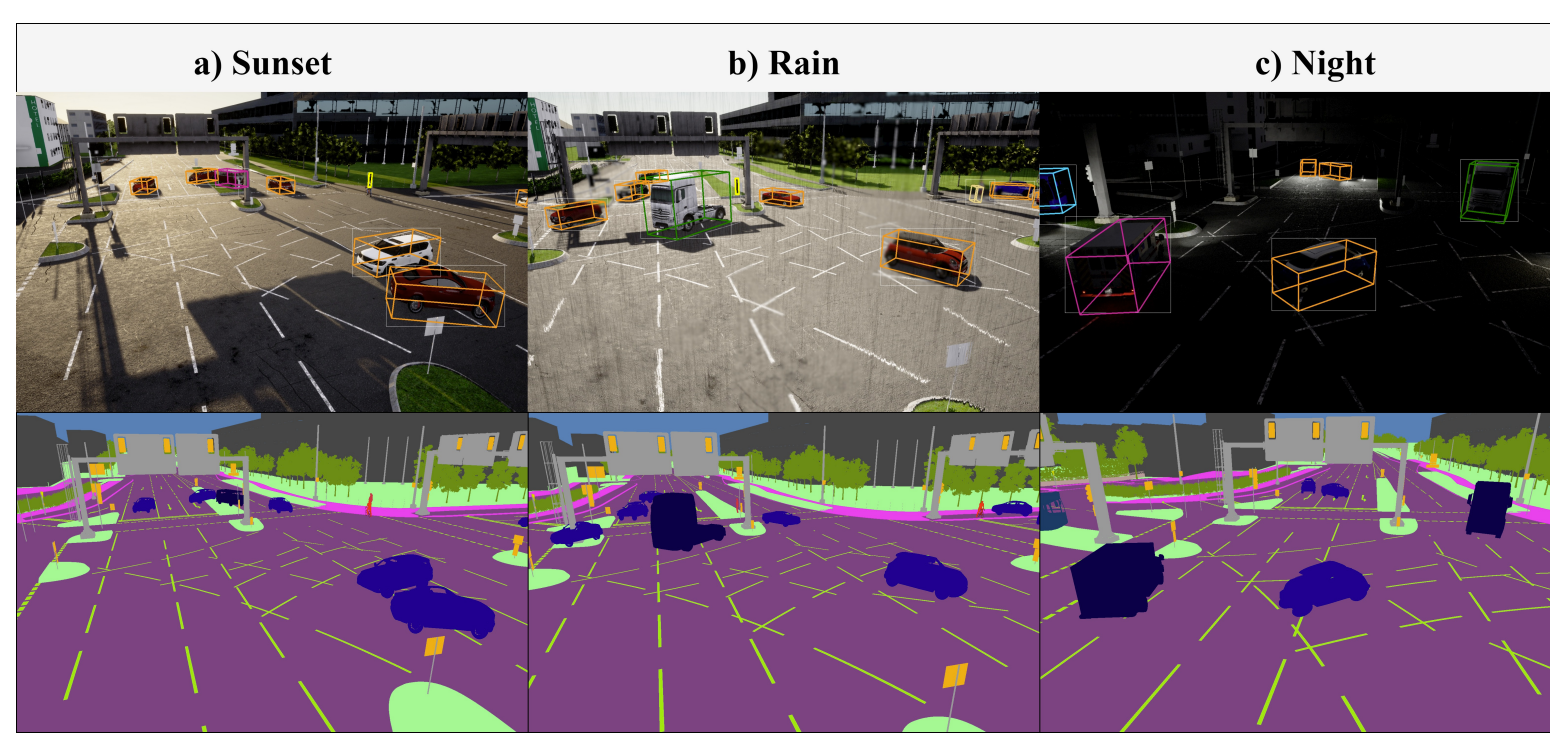
A weakly-supervised Sim2Real domain adaptation framework for monocular 3D object detection on roadside infrastructure. Closes the simulation-to-reality gap with synthetic supervision and a domain-adaptive teacher–student loop.
- Sim2Real
- 3D Detection
- PyTorch
- ITSC 2024